
Over the next few weeks, I’ll be doing a series of blog posts on how to improve your frames per second (FPS) from your webcam using Python, OpenCV, and threading.
Using threading to handle I/O-heavy tasks (such as reading frames from a camera sensor) is a programming model that has existed for decades.
For example, if we were to build a web crawler to spider a series of webpages (a task that is, by definition, I/O bound), our main program would spawn multiple threads to handle downloading the set of pages in parallel instead of relying on only a single thread (our “main thread”) to download the pages in sequential order. Doing this allows us to spider the webpages substantially faster.
The same notion applies to computer vision and reading frames from a camera — we can improve our FPS simply by creating a new thread that does nothing but poll the camera for new frames while our main thread handles processing the current frame.
This is a simple concept, but it’s one that’s rarely seen in OpenCV examples since it does add a few extra lines of code (or sometimes a lot of lines, depending on your threading library) to the project. Multithreading can also make your program harder to debug, but once you get it right, you can dramatically improve your FPS.
We’ll start off this series of posts by writing a threaded Python class to access your webcam or USB camera using OpenCV.
Next week we’ll use threads to improve the FPS of your Raspberry Pi and the picamera module.
Finally, we’ll conclude this series of posts by creating a class that unifies both the threaded webcam/USB camera code and the threaded picamera code into a single class, making all webcam/video processing examples on PyImageSearch not only run faster, but run on either your laptop/desktop or the Raspberry Pi without changing a single line of code!
Use threading to obtain higher FPS
The “secret” to obtaining higher FPS when processing video streams with OpenCV is to move the I/O (i.e., the reading of frames from the camera sensor) to a separate thread.
You see, accessing your webcam/USB camera using the cv2.VideoCapture function and the .read() method is a blocking operation. The main thread of our Python script is completely blocked (i.e., “stalled”) until the frame is read from the camera device and returned to our script.
I/O tasks, as opposed to CPU bound operations, tend to be quite slow. While computer vision and video processing applications are certainly quite CPU heavy (especially if they are intended to run in real-time), it turns out that camera I/O can be a huge bottleneck as well.
As we’ll see later in this post, just by adjusting the the camera I/O process, we can increase our FPS by as much as 379%!
Of course, this isn’t a true increase of FPS as it is a dramatic reduction in latency (i.e., a frame is always available for processing; we don’t need to poll the camera device and wait for the I/O to complete). Throughout the rest of this post, I will refer to our metrics as an “FPS increase” for brevity, but also keep in mind that it’s a combination of both a decrease in latency and an increase in FPS.
In order to accomplish this FPS increase/latency decrease, our goal is to move the reading of frames from a webcam or USB device to an entirely different thread, totally separate from our main Python script.
This will allow frames to be read continuously from the I/O thread, all while our root thread processes the current frame. Once the root thread has finished processing its frame, it simply needs to grab the current frame from the I/O thread. This is accomplished without having to wait for blocking I/O operations.
The first step in implementing our threaded video stream functionality is to define a FPS class that we can use to measure our frames per second. This class will help us obtain quantitative evidence that threading does indeed increase FPS.
We’ll then define a WebcamVideoStream class that will access our webcam or USB camera in a threaded fashion.
Finally, we’ll define our driver script, fps_demo.py, that will compare single threaded FPS to multi-threaded FPS.
Note: Thanks to Ross Milligan and his blog who inspired me to do this blog post.
Increasing webcam FPS with Python and OpenCV
I’ve actually already implemented webcam/USB camera and picamera threading inside the imutils library. However, I think a discussion of the implementation can greatly improve our knowledge of how and why threading increases FPS.
To start, if you don’t already have imutils installed, you can install it using pip :
$ pip install imutils
Otherwise, you can upgrade to the latest version via:
$ pip install --upgrade imutils
As I mentioned above, the first step is to define a FPS class that we can use to approximate the frames per second of a given camera + computer vision processing pipeline:
# import the necessary packages import datetime class FPS: def __init__(self): # store the start time, end time, and total number of frames # that were examined between the start and end intervals self._start = None self._end = None self._numFrames = 0 def start(self): # start the timer self._start = datetime.datetime.now() return self def stop(self): # stop the timer self._end = datetime.datetime.now() def update(self): # increment the total number of frames examined during the # start and end intervals self._numFrames += 1 def elapsed(self): # return the total number of seconds between the start and # end interval return (self._end - self._start).total_seconds() def fps(self): # compute the (approximate) frames per second return self._numFrames / self.elapsed()
On Line 5-10 we define the constructor to our FPS class. We don’t require any arguments, but we do initialize three important variables:
_start: The starting timestamp of when we commenced measuring the frame read._end: The ending timestamp of when we stopped measuring the frame read._numFrames: The total number of frames that were read during the_startand_endinterval.
Lines 12-15 define the start method, which as the name suggests, kicks-off the timer.
Similarly, Lines 17-19 define the stop method which grabs the ending timestamp.
The update method on Lines 21-24 simply increments the number of frames that have been read during the starting and ending interval.
We can grab the total number of seconds that have elapsed between the starting and ending interval on Lines 26-29 by using the elapsed method.
And finally, we can approximate the FPS of our camera + computer vision pipeline by using the fps method on Lines 31-33. By taking the total number of frames read during the interval and dividing by the number of elapsed seconds, we can obtain our estimated FPS.
Now that we have our FPS class defined (so we can empirically compare results), let’s define the WebcamVideoStream class which encompasses the actual threaded camera read:
# import the necessary packages from threading import Thread import cv2 class WebcamVideoStream: def __init__(self, src=0): # initialize the video camera stream and read the first frame # from the stream self.stream = cv2.VideoCapture(src) (self.grabbed, self.frame) = self.stream.read() # initialize the variable used to indicate if the thread should # be stopped self.stopped = False
We define the constructor to our WebcamVideoStream class on Line 6, passing in an (optional) argument: the src of the stream.
If the src is an integer, then it is presumed to be the index of the webcam/USB camera on your system. For example, a value of src=0 indicates the first camera and a value of src=1 indicates the second camera hooked up to your system (provided you have a second one, of course).
If src is a string, then it assumed to be the path to a video file (such as .mp4 or .avi) residing on disk.
Line 9 takes our src value and makes a call to cv2.VideoCapture which returns a pointer to the camera/video file.
Now that we have our stream pointer, we can call the .read() method to poll the stream and grab the next available frame (Line 10). This is done strictly for initialization purposes so that we have an initial frame stored in the class.
We’ll also initialize stopped , a boolean indicating whether the threaded frame reading should be stopped or not.
Now, let’s move on to actually utilizing threads to read frames from our video stream using OpenCV:
def start(self): # start the thread to read frames from the video stream Thread(target=self.update, args=()).start() return self def update(self): # keep looping infinitely until the thread is stopped while True: # if the thread indicator variable is set, stop the thread if self.stopped: return # otherwise, read the next frame from the stream (self.grabbed, self.frame) = self.stream.read() def read(self): # return the frame most recently read return self.frame def stop(self): # indicate that the thread should be stopped self.stopped = True
Lines 16-19 define our start method, which as the name suggests, starts the thread to read frames from our video stream. We accomplish this by constructing a Thread object using the update method as the callable object invoked by the run() method of the thread.
Once our driver script calls the start method of the WebcamVideoStream class, the update method (Lines 21-29) will be called.
As you can see from the code above, we start an infinite loop on Line 23 that continuously reads the next available frame from the video stream via the .read() method (Line 29). If the stopped indicator variable is ever set, we break from the infinite loop (Lines 25 and 26).
Again, keep in mind that once the start method has been called, the update method is placed in a separate thread from our main Python script — this separate thread is how we obtain our increased FPS performance.
In order to access the most recently polled frame from the stream , we’ll use the read method on Lines 31-33.
Finally, the stop method (Lines 35-37) simply sets the stopped indicator variable and signifies that the thread should be terminated.
Now that we have defined both our FPS and WebcamVideoStream classes, we can put all the pieces together inside fps_demo.py :
# import the necessary packages
from __future__ import print_function
from imutils.video import WebcamVideoStream
from imutils.video import FPS
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-n", "--num-frames", type=int, default=100,
help="# of frames to loop over for FPS test")
ap.add_argument("-d", "--display", type=int, default=-1,
help="Whether or not frames should be displayed")
args = vars(ap.parse_args())
We start off by importing our necessary packages on Lines 2-7. Notice how we are importing the FPS and WebcamVideoStream classes from the imutils library. If you do not have imutils installed or you need to upgrade to the latest version, please see the note at the top of this section.
Lines 10-15 handle parsing our command line arguments. We’ll require two switches here: --num-frames , which is the number of frames to loop over to obtain our FPS estimate, and --display , an indicator variable used to specify if we should use the cv2.imshow function to display the frames to our monitor or not.
The --display argument is actually really important when approximating the FPS of your video processing pipeline. Just like reading frames from a video stream is a form of I/O, so is displaying the frame to your monitor! We’ll discuss this in more detail inside the Threading results section of this post.
Let’s move on to the next code block which does no threading and uses blocking I/O when reading frames from the camera stream. This block of code will help us obtain a baseline for our FPS:
# grab a pointer to the video stream and initialize the FPS counter
print("[INFO] sampling frames from webcam...")
stream = cv2.VideoCapture(0)
fps = FPS().start()
# loop over some frames
while fps._numFrames < args["num_frames"]:
# grab the frame from the stream and resize it to have a maximum
# width of 400 pixels
(grabbed, frame) = stream.read()
frame = imutils.resize(frame, width=400)
# check to see if the frame should be displayed to our screen
if args["display"] > 0:
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# update the FPS counter
fps.update()
# stop the timer and display FPS information
fps.stop()
print("[INFO] elasped time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
# do a bit of cleanup
stream.release()
cv2.destroyAllWindows()
Lines 19 and 20 grab a pointer to our video stream and then start the FPS counter.
We then loop over the number of desired frames on Line 23, read the frame from camera (Line 26), update our FPS counter (Line 35), and optionally display the frame to our monitor (Lines 30-32).
After we have read --num-frames from the stream, we stop the FPS counter and display the elapsed time along with approximate FPS on Lines 38-40.
Now, let’s look at our threaded code to read frames from our video stream:
# created a *threaded* video stream, allow the camera sensor to warmup,
# and start the FPS counter
print("[INFO] sampling THREADED frames from webcam...")
vs = WebcamVideoStream(src=0).start()
fps = FPS().start()
# loop over some frames...this time using the threaded stream
while fps._numFrames < args["num_frames"]:
# grab the frame from the threaded video stream and resize it
# to have a maximum width of 400 pixels
frame = vs.read()
frame = imutils.resize(frame, width=400)
# check to see if the frame should be displayed to our screen
if args["display"] > 0:
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# update the FPS counter
fps.update()
# stop the timer and display FPS information
fps.stop()
print("[INFO] elasped time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
# do a bit of cleanup
cv2.destroyAllWindows()
vs.stop()
Overall, this code looks near identical to the code block above, only this time we are leveraging the WebcamVideoStream class.
We start the threaded stream on Line 49, loop over the desired number of frames on Lines 53-65 (again, keeping track of the total number of frames read), and then display our output on Lines 69 and 70.
Threading results
To see the affects of webcam I/O threading in action, just execute the following command:
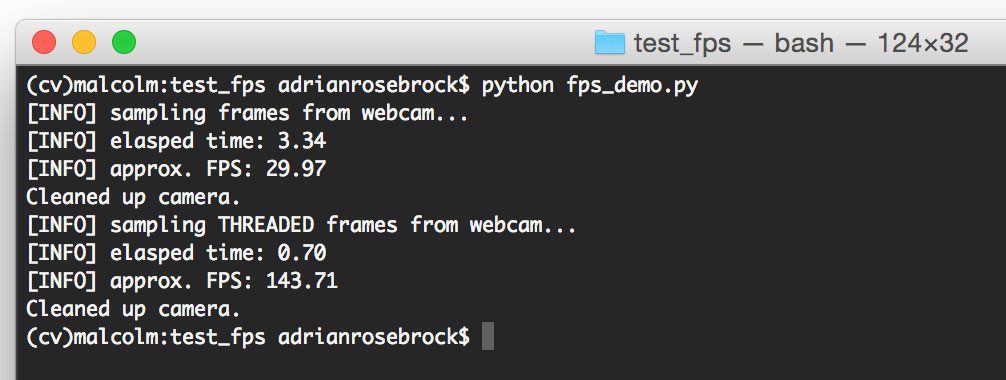
$ python fps_demo.py
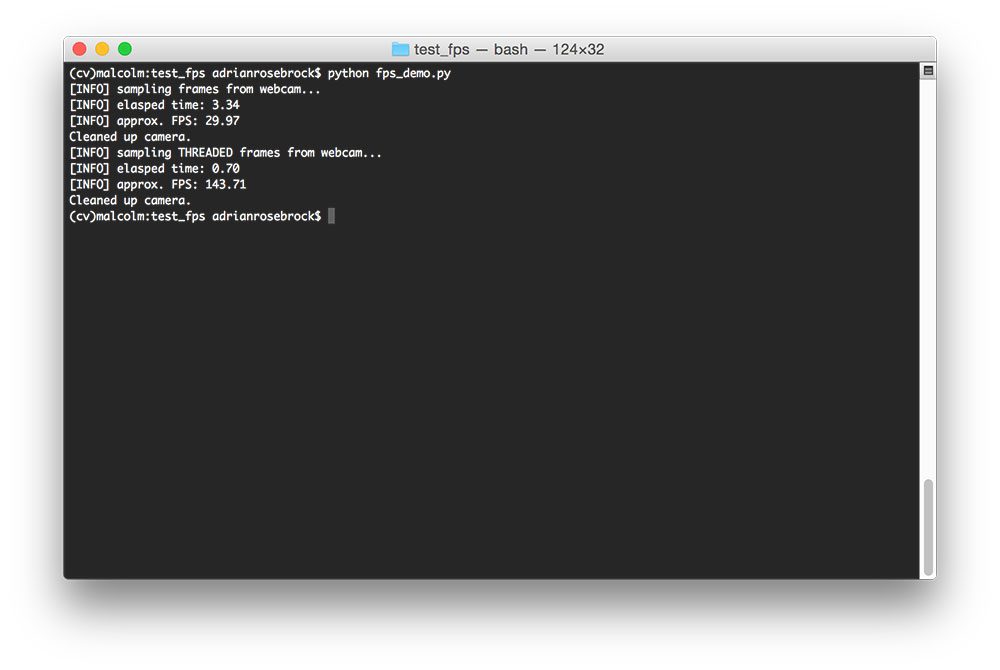
As we can see, by using no threading and sequentially reading frames from our video stream in the main thread of our Python script, we are able to obtain a respectable 29.97 FPS.
However, once we switch over to using threaded camera I/O, we reach 143.71 FPS — an increase of over 379%!
This is clearly a huge decrease in our latency and a dramatic increase in our FPS, obtained simply by using threading.
However, as we’re about to find out, using the cv2.imshow can substantially decrease our FPS. This behavior makes sense if you think about it — the cv2.show function is just another form of I/O, only this time instead of reading a frame from a video stream, we’re instead sending the frame to output on our display.
Note: We’re also using the cv2.waitKey(1) function here which does add a 1ms delay to our main loop. That said, this function is necessary for keyboard interaction and to display the frame to our screen (especially once we get to the Raspberry Pi threading lessons).
To demonstrate how the cv2.imshow I/O can decrease FPS, just issue this command:
$ python fps_demo.py --display 1
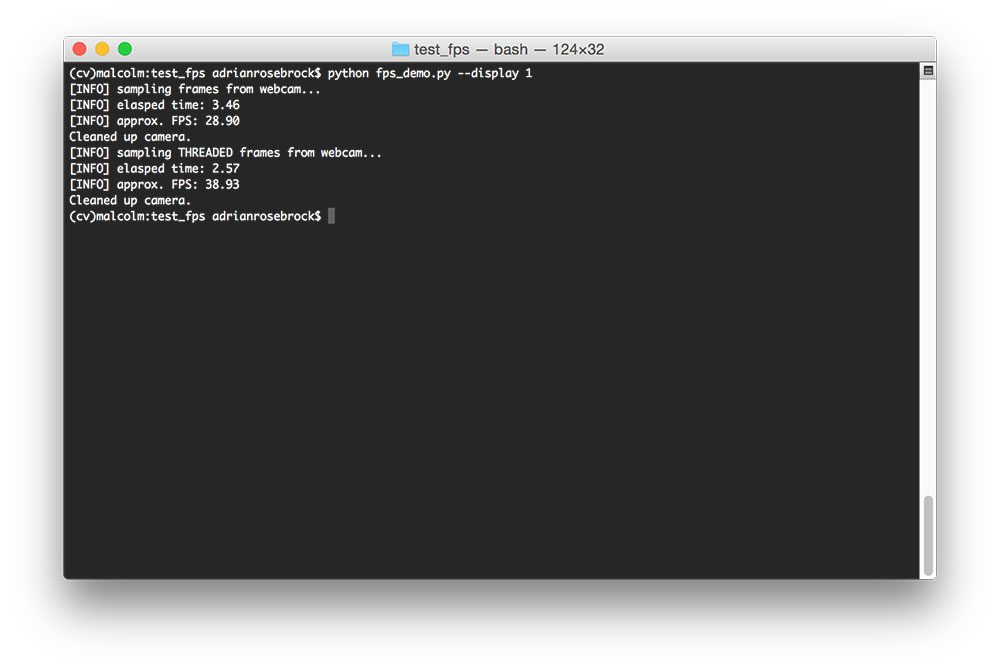
Using no threading, we reach 28.90 FPS. And with threading we hit 39.93 FPS. This is still a 38% increase in FPS, but nowhere near the 379% increase from our previous example.
Overall, I recommend using the cv2.imshow function to help debug your program — but if your final production code doesn’t need it, there is no reason to include it since you’ll be hurting your FPS.
A great example of such a program would be developing a home surveillance motion detector that sends you a txt message containing a photo of the person who just walked in the front door of your home. Realistically, you do not need the cv2.imshow function for this. By removing it, you can increase the performance of your motion detector and allow it to process more frames faster.
What's next? We recommend PyImageSearch University.
86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: July 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In this blog post we learned how threading can be used to increase your webcam and USB camera FPS using Python and OpenCV.
As the examples in this post demonstrated, we were able to obtain a 379% increase in FPS simply by using threading. While this isn’t necessarily a fair comparison (since we could be processing the same frame multiple times), it does demonstrate the importance of reducing latency and always having a frame ready for processing.
In nearly all situations, using threaded access to your webcam can substantially improve your video processing pipeline.
Next week we’ll learn how to increase the FPS of our Raspberry Pi using the picamera module.
Be sure to enter your email address in the form below to be notified when the next post goes live!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

