Over the past two weeks on the PyImageSearch blog, we have discussed how to use threading to increase our FPS processing rate on both built-in/USB webcams, along with the Raspberry Pi camera module.
By utilizing threading, we learned that we can substantially reduce the affects of I/O latency, leaving the main thread to run without being blocked as it waits for I/O operations to complete (i.e., the reading of the most recent frame from the camera sensor).
Using this threading model, we can dramatically increase our frame processing rate by upwards of 200%.
While this increase in FPS processing rate is fantastic, there is still a (somewhat unrelated) problem that has been bothering me for for quite awhile.
You see, there are many times on the PyImageSearch blog where I write posts that are intended for use with a built-in or USB webcam, such as:
- Basic motion detection and tracking with Python and OpenCV
- Tracking object movement
- Finding targets in drone/quadcopter streams
All of these posts rely on the cv2.VideoCapture method.
However, this reliance on cv2.VideoCapture becomes a problem if you want to use the code on our Raspberry Pi. Provided that you are not using a USB camera with the Pi and are in fact using the picamera module, you’ll need to modify the code to be compatible with picamera , as discussed in the accessing the Raspberry Pi Camera with Python and OpenCV post.
While there are only a few required changes to the code (i.e., instantiating the PiCamera class and swapping out the frame read loop), it can still be troublesome, especially if you are just getting started with Python and OpenCV.
Conversely, there are other posts on the PyImageSearch blog which use the picamera module instead of cv2.VideoCapture . A great example of such a post is home surveillance and motion detection with the Raspberry Pi, Python, OpenCV and Dropbox. If you do not own a Raspberry Pi (or want to use a built-in or USB webcam instead of the Raspberry Pi camera module), you would again have to swap out a few lines of code.
Thus, the goal of this post is to a construct a unified interface to both picamera and cv2.VideoCapture using only a single class named VideoStream . This class will call either WebcamVideoStream or PiVideoStream based on the arguments supplied to the constructor.
Most importantly, our implementation of the VideoStream class will allow future video processing posts on the PyImageSearch blog to run on either a built-in webcam, a USB camera, or the Raspberry Pi camera module — all without changing a single line of code!
Read on to find out more.
Unifying picamera and cv2.VideoCapture into a single class with OpenCV
If you recall from two weeks ago, we have already defined our threaded WebcamVideoStream class for built-in/USB webcam access. And last week we defined the PiVideoStream class for use with the Raspberry Pi camera module and the picamera Python package.
Today we are going to unify these two classes into a single class named VideoStream .
Depending on the parameters supplied to the VideoStream constructor, the appropriate video stream class (either for the USB camera or picamera module) will be instantiated. This implementation of VideoStream will allow us to use the same set of code for all future video processing examples on the PyImageSearch blog.
Readers such as yourselves will only need to supply a single command line argument (or JSON configuration, etc.) to indicate whether they want to use their USB camera or the Raspberry Pi camera module — the code itself will not have to change one bit!
As I’ve mentioned in the previous two blog posts in this series, the functionality detailed here is already implemented inside the imutils package.
If you do not have imutils already installed on your system, just use pip to install it for you:
$ pip install imutils
Otherwise, you can upgrade to the latest version using:
$ pip install --upgrade imutils
Let’s go ahead and get started by defining the VideoStream class:
# import the necessary packages from webcamvideostream import WebcamVideoStream class VideoStream: def __init__(self, src=0, usePiCamera=False, resolution=(320, 240), framerate=32): # check to see if the picamera module should be used if usePiCamera: # only import the picamera packages unless we are # explicity told to do so -- this helps remove the # requirement of `picamera[array]` from desktops or # laptops that still want to use the `imutils` package from pivideostream import PiVideoStream # initialize the picamera stream and allow the camera # sensor to warmup self.stream = PiVideoStream(resolution=resolution, framerate=framerate) # otherwise, we are using OpenCV so initialize the webcam # stream else: self.stream = WebcamVideoStream(src=src)
On Line 2 we import our WebcamVideoStream class that we use for accessing built-in/USB web cameras.
Line 5 defines the constructor to our VideoStream . The src keyword argument is only for the cv2.VideoCapture function (abstracted away by the WebcamVideoStream class), while usePiCamera , resolution , and framerate are for the picamera module.
We want to take special care to not make any assumptions about the the type of hardware or the Python packages installed by the end user. If a user is programming on a laptop or a desktop, then it’s extremely unlikely that they will have the picamera module installed.
Thus, we’ll only import the PiVideoStream class (which then imports dependencies from picamera ) if the usePiCamera boolean indicator is explicitly defined (Lines 8-18).
Otherwise, we’ll simply instantiate the WebcamVideoStream (Lines 22 and 23) which requires no dependencies other than a working OpenCV installation.
Let’s define the remainder of the VideoStream class:
def start(self): # start the threaded video stream return self.stream.start() def update(self): # grab the next frame from the stream self.stream.update() def read(self): # return the current frame return self.stream.read() def stop(self): # stop the thread and release any resources self.stream.stop()
As we can see, the start , update , read , and stop methods simply call the corresponding methods of the stream which was instantiated in the constructor.
Now that we have defined the VideoStream class, let’s put it to work in our videostream_demo.py driver script:
# import the necessary packages
from imutils.video import VideoStream
import datetime
import argparse
import imutils
import time
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-p", "--picamera", type=int, default=-1,
help="whether or not the Raspberry Pi camera should be used")
args = vars(ap.parse_args())
# initialize the video stream and allow the cammera sensor to warmup
vs = VideoStream(usePiCamera=args["picamera"] > 0).start()
time.sleep(2.0)
We start off by importing our required Python packages (Lines 2-7) and parsing our command line arguments (Lines 10-13). We only need a single switch here, --picamera , which is used to indicate whether the Raspberry Pi camera module or the built-in/USB webcam should be used. We’ll default to the built-in/USB webcam.
Lines 16 and 17 instantiate our VideoStream and allow the camera sensor to warmup.
At this point, all the hard work is done! We simply need to start looping over frames from the camera sensor:
# loop over the frames from the video stream
while True:
# grab the frame from the threaded video stream and resize it
# to have a maximum width of 400 pixels
frame = vs.read()
frame = imutils.resize(frame, width=400)
# draw the timestamp on the frame
timestamp = datetime.datetime.now()
ts = timestamp.strftime("%A %d %B %Y %I:%M:%S%p")
cv2.putText(frame, ts, (10, frame.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX,
0.35, (0, 0, 255), 1)
# show the frame
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
# do a bit of cleanup
cv2.destroyAllWindows()
vs.stop()
On Line 20 we start an infinite loop that continues until we press the q key.
Line 23 calls the read method of VideoStream which returns the most recently read frame from the stream (again, either a USB webcam stream or the Raspberry Pi camera module).
We then resize the frame (Line 24), draw the current timestamp on it (Lines 27-30), and finally display the frame to our screen (Lines 33 and 34).
This is obviously a trivial example of a video processing pipeline, but keep in mind the goal of this post is to simply demonstrate how we can create a unified interface to both the picamera module and the cv2.VideoCapture function.
Testing out our unified interface
To test out our VideoStream class, I used:
- A Raspberry Pi 2 with both a Raspberry Pi camera module and a USB camera (a Logitech C920 which is plug-and-play compatible with the Pi).
- My OSX laptop with built-in webcam.
To access the built-in camera on my OSX machine, I executed the following command:
$ python videostream_demo.py
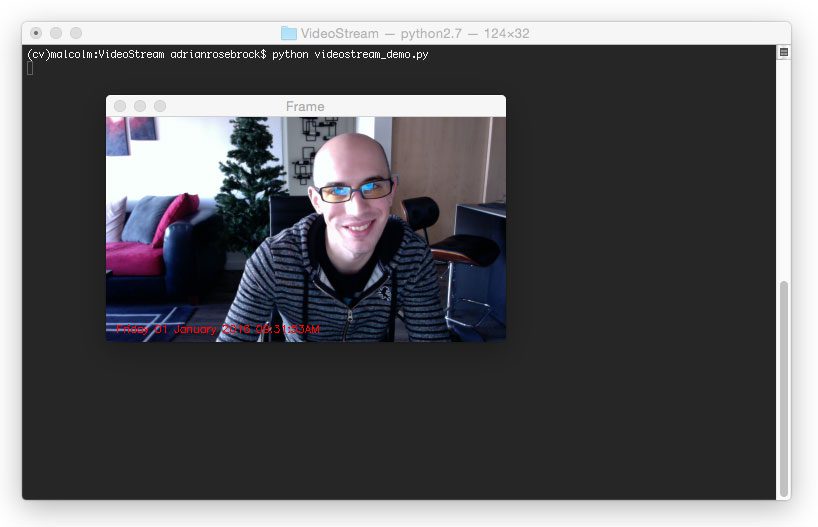
As you can see, frames are read from my webcam and displayed to my screen.
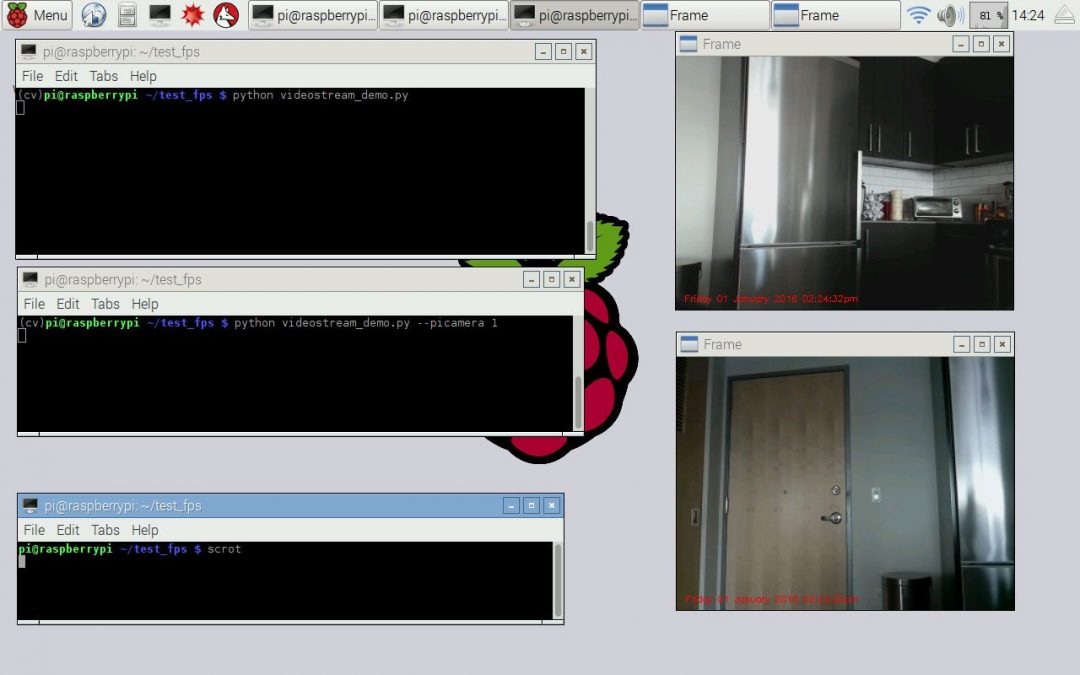
I then moved over to my Raspberry Pi where I executed the same command to access the USB camera:
$ python videostream_demo.py
Followed by this command to read frames from the Raspberry Pi camera module:
$ python videostream_demo.py --picamera 1
The results of executing these commands in two separate terminals can be seen below:
As you can see, the only thing that has changed is the command line arguments where I supply --picamera 1 , indicating that I want to use the Raspberry Pi camera module — not a single line of code needed to be modified!
You can see a video demo of both the USB camera and the Raspberry Pi camera module being used simultaneously below:
What's next? We recommend PyImageSearch University.

86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: May 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
This blog post was the third and final installment in our series on increasing FPS processing rate and decreasing I/O latency on both USB cameras and the Raspberry Pi camera module.
We took our implementations of the (threaded) WebcamVideoStream and PiVideoStream classes and unified them into a single VideoStream class, allowing us to seamlessly access either built-in/USB cameras or the Raspberry Pi camera module.
This allows us to construct Python scripts that will run on both laptop/desktop machines along with the the Raspberry Pi without having to modify a single line of code — provided that we supply some sort of method to indicate which camera we would like to use, of course, This can easily be accomplished using command line arguments, JSON configuration files, etc.
In future blog posts where video processing is performed, I’ll be using the VideoStream class to make the code examples compatible with both your USB camera and the Raspberry Pi camera module — no longer will you have to adjust the code based on your setup!
Anyway, I hope you enjoyed this series of posts. If you found me doing a series of blog posts (rather than one-off posts on a specific topic) beneficial, please let me know in the comments thread.
And also consider signing up for the PyImageSearch Newsletter using the form below to be notified when new blog posts are published!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

