
Backpropagation is arguably the most important algorithm in neural network history — without (efficient) backpropagation, it would be impossible to train deep learning networks to the depths that we see today. Backpropagation can be considered the cornerstone of modern neural networks and deep learning.
The original incarnation of backpropagation was introduced back in the 1970s, but it wasn’t until the seminal 1988 paper, Learning representations by back-propagating errors by Rumelhart, Hinton, and Williams, were we able to devise a faster algorithm, more adept to training deeper networks.
There are quite literally hundreds (if not thousands) of tutorials on backpropagation available today. Some of my favorites include:
- Andrew Ng’s discussion on backpropagation inside the Machine Learning course by Coursera.
- The heavily mathematically motivated Chapter 2 — How the backpropagation algorithm works from Neural Networks and Deep Learning by Michael Nielsen.
- Stanford’s cs231n exploration and analysis of backpropagation.
- Matt Mazur’s excellent concrete example (with actual worked numbers) that demonstrates how backpropagation works.
As you can see, there are no shortage of backpropagation guides — instead of regurgitating and reiterating what has been said by others hundreds of times before, I’m going to take a different approach and do what makes PyImageSearch publications special:
Construct an intuitive, easy to follow implementation of the backpropagation algorithm using the Python language.
Inside this implementation, we’ll build an actual neural network and train it using the back propagation algorithm. By the time you finish this section, you’ll understand how backpropagation works — and perhaps more importantly, you’ll have a stronger understanding of how this algorithm is used to train neural networks from scratch.
Backpropagation
The backpropagation algorithm consists of two phases:
- The forward pass where our inputs are passed through the network and output predictions obtained (also known as the propagation phase).
- The backward pass where we compute the gradient of the loss function at the final layer (i.e., predictions layer) of the network and use this gradient to recursively apply the chain rule to update the weights in our network (also known as the weight update phase).
We’ll start by reviewing each of these phases at a high level. From there, we’ll implement the backpropagation algorithm using Python. Once we have implemented backpropagation we’ll want to be able to make predictions using our network — this is simply the forward pass phase, only with a small adjustment (in terms of code) to make the predictions more efficient.
Finally, I’ll demonstrate how to train a custom neural network using backpropagation and Python on both the:
- XOR dataset
- MNIST dataset
The Forward Pass
The purpose of the forward pass is to propagate our inputs through the network by applying a series of dot products and activations until we reach the output layer of the network (i.e., our predictions). To visualize this process, let’s first consider the XOR dataset (Table 1, left).
| x0 | x1 | y | x0 | x1 | x2 | |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 1 | |
| 0 | 1 | 1 | 0 | 1 | 1 | |
| 1 | 0 | 1 | 1 | 0 | 1 | |
| 1 | 1 | 0 | 1 | 1 | 1 |
Here, we can see that each entry X in the design matrix (left) is 2-dim — each data point is represented by two numbers. For example, the first data point is represented by the feature vector (0, 0), the second data point by (0, 1), etc. We then have our output values y as the right column. Our target output values are the class labels. Given an input from the design matrix, our goal is to correctly predict the target output value.
To obtain perfect classification accuracy on this problem we’ll need a feedforward neural network with at least a single hidden layer, so let’s go ahead and start with a 2−2−1 architecture (Figure 1, top). This is a good start; however, we’re forgetting to include the bias term. There are two ways to include the bias term b in our network. We can either:
- Use a separate variable.
- Treat the bias as a trainable parameter within the weight matrix by inserting a column of 1’s into the feature vectors.
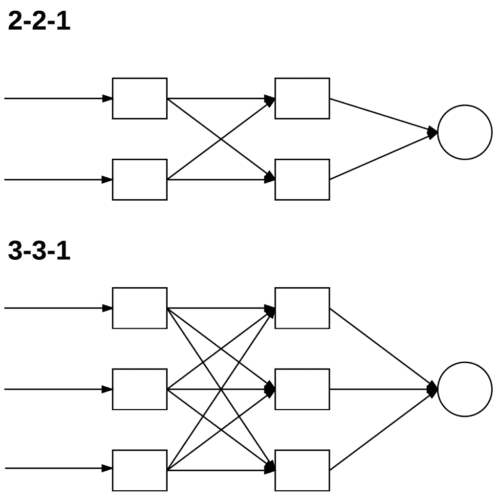
Inserting a column of 1’s into our feature vector is done programmatically, but to ensure we understand this point, let’s update our XOR design matrix to explicitly see this taking place (Table 1, right). As you can see, a column of 1’s have been added to our feature vectors. In practice you can insert this column anywhere you like, but we typically place it either as (1) the first entry in the feature vector or (2) the last entry in the feature vector.
Since we have changed the size of our input feature vector (normally performed inside neural network implementation itself so that we do not need to explicitly modify our design matrix), that changes our (perceived) network architecture from 2−2−1 to an (internal) 3−3−1 (Figure 1, bottom).
We’ll still refer to this network architecture as 2−2−1, but when it comes to implementation, it’s actually 3−3−1 due to the addition of the bias term embedded in the weight matrix.
Finally, recall that both our input layer and all hidden layers require a bias term; however, the final output layer does not require a bias. The benefit of applying the bias trick is that we do not need to explicitly keep track of the bias parameter any longer — it is now a trainable parameter within the weight matrix, thus making training more efficient and substantially easier to implement.
To see the forward pass in action, we first initialize the weights in our network, as in Figure 2. Notice how each arrow in the weight matrix has a value associated with it — this is the current weight value for a given node and signifies the amount in which a given input is amplified or diminished. This weight value will then be updated during the backpropagation phase.
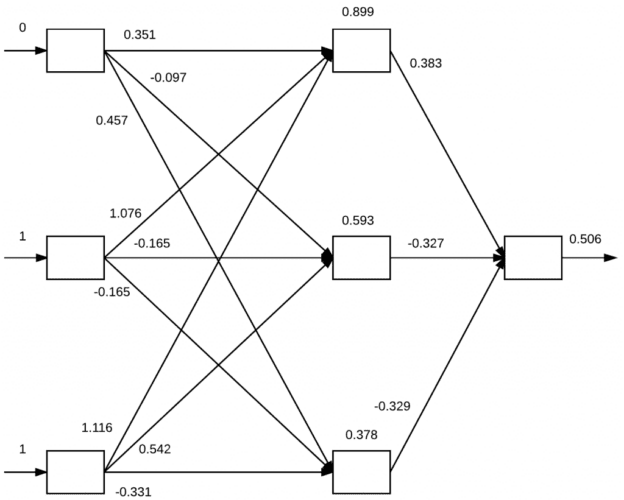
On the far left of Figure 2, we present the feature vector (0, 1, 1) (and target output value 1 to the network). Here we can see that 0, 1, and 1 have been assigned to the three input nodes in the network. To propagate the values through the network and obtain the final classification, we need to take the dot product between the inputs and the weight values, followed by applying an activation function (in this case, the sigmoid function, σ).
Let’s compute the inputs to the three nodes in the hidden layers:
- σ((0×0.351) + (1×1.076) + (1×1.116)) = 0.899
- σ((0× −0.097) + (1× −0.165) + (1×0.542)) = 0.593
- σ((0×0.457) + (1× −0.165) + (1× −0.331)) = 0.378
Looking at the node values of the hidden layers (Figure 2, middle), we can see the nodes have been updated to reflect our computation.
We now have our inputs to the hidden layer nodes. To compute the output prediction, we once again compute the dot product followed by a sigmoid activation:
(1) σ((0.899×0.383) + (0.593× −0.327) + (0.378× −0.329)) = 0.506
The output of the network is thus 0.506. We can apply a step function to determine if this output is the correct classification or not:
 = \begin{cases} 1 & \textit{if net} > 0 \\ 0 & \textit{otherwise} \end{cases}")
Applying the step function with net = 0.506 we see that our network predicts 1 which is, in fact, the correct class label. However, our network is not very confident in this class label — the predicted value 0.506 is very close to the threshold of the step. Ideally, this prediction should be closer to 0.98−0.99, implying that our network has truly learned the underlying pattern in the dataset. In order for our network to actually “learn,” we need to apply the backward pass.
The Backward Pass
To apply the backpropagation algorithm, our activation function must be differentiable so that we can compute the partial derivative of the error with respect to a given weight wi, j, loss (E), node output oj, and network output netj.
(2) 
As the calculus behind backpropagation has been exhaustively explained many times in previous works (see Andrew Ng, Michael Nielsen, and Matt Mazur), I’m going to skip the derivation of the backpropagation chain rule update and instead explain it via code in the following section.
For the mathematically astute, please see the references above for more information on the chain rule and its role in the backpropagation algorithm. By explaining this process in code, my goal is to help readers understand backpropagation through a more intuitive, implementation sense.
Implementing Backpropagation with Python
Let’s go ahead and get started implementing backpropagation. Open a new file, name it neuralnetwork.py, store it in the nn submodule of pyimagesearch (like we did with perceptron.py), and let’s get to work:
# import the necessary packages import numpy as np class NeuralNetwork: def __init__(self, layers, alpha=0.1): # initialize the list of weights matrices, then store the # network architecture and learning rate self.W = [] self.layers = layers self.alpha = alpha
On Line 2, we import the only required package we’ll need for our implementation of back propagation — the NumPy numerical processing library.
Line 5 then defines the constructor to our NeuralNetwork class. The constructor requires a single argument, followed by a second optional one:
layers: A list of integers which represents the actual architecture of the feedforward network. For example, a value of [2, 2, 1] would imply that our first input layer has two nodes, our hidden layer has two nodes, and our final output layer has one node.alpha: Here we can specify the learning rate of our neural network. This value is applied during the weight update phase.
Line 8 initializes our list of weights for each layer, W. We then store layers and alpha on Lines 9 and 10.
Our weights list W is empty, so let’s go ahead and initialize it now:
# start looping from the index of the first layer but # stop before we reach the last two layers for i in np.arange(0, len(layers) - 2): # randomly initialize a weight matrix connecting the # number of nodes in each respective layer together, # adding an extra node for the bias w = np.random.randn(layers[i] + 1, layers[i + 1] + 1) self.W.append(w / np.sqrt(layers[i]))
On Line 14, we start looping over the number of layers in the network (i.e., len(layers)), but we stop before the final two layers (we’ll find out exactly why later in the explanation of this constructor).
Each layer in the network is randomly initialized by constructing an M×N weight matrix by sampling values from a standard, normal distribution (Line 18). The matrix is M×N since we wish to connect every node in the current layer to every node in the next layer.
For example, let’s suppose that layers[i] = 2 and layers[i + 1] = 2. Our weight matrix would, therefore, be 2×2 to connect all sets of nodes between the layers. However, we need to be careful here, as we are forgetting an important component — the bias term. To account for the bias, we add one to the number of layers[i] and layers[i + 1] — doing so changes our weight matrix w to have the shape 3×3 given 2+1 nodes for the current layer and 2+1 nodes for the next layer. We scale w by dividing by the square root of the number of nodes in the current layer, thereby normalizing the variance of each neuron’s output (http://cs231n.stanford.edu/) (Line 19).
The final code block of the constructor handles the special case where the input connections need a bias term, but the output does not:
# the last two layers are a special case where the input # connections need a bias term but the output does not w = np.random.randn(layers[-2] + 1, layers[-1]) self.W.append(w / np.sqrt(layers[-2]))
Again, these weight values are randomly sampled and then normalized.
The next function we define is a Python “magic method” named __repr__ — this function is useful for debugging:
def __repr__(self):
# construct and return a string that represents the network
# architecture
return "NeuralNetwork: {}".format(
"-".join(str(l) for l in self.layers))
In our case, we’ll format a string for our NeuralNetwork object by concatenating the integer value of the number of nodes in each layer. Given a layers value of (2, 2, 1), the output of calling this function will be:
>>> from pyimagesearch.nn import NeuralNetwork >>> nn = NeuralNetwork([2, 2, 1]) >>> print(nn) NeuralNetwork: 2-2-1
Next, we can define our sigmoid activation function:
def sigmoid(self, x): # compute and return the sigmoid activation value for a # given input value return 1.0 / (1 + np.exp(-x))
As well as the derivative of the sigmoid which we’ll use during the backward pass:
def sigmoid_deriv(self, x): # compute the derivative of the sigmoid function ASSUMING # that x has already been passed through the 'sigmoid' # function return x * (1 - x)
Again, note that whenever you perform backpropagation, you’ll always want to choose an activation function that is differentiable.
We’ll draw inspiration from the scikit-learn library and define a function named fit which will be responsible for actually training our NeuralNetwork:
def fit(self, X, y, epochs=1000, displayUpdate=100):
# insert a column of 1's as the last entry in the feature
# matrix -- this little trick allows us to treat the bias
# as a trainable parameter within the weight matrix
X = np.c_[X, np.ones((X.shape[0]))]
# loop over the desired number of epochs
for epoch in np.arange(0, epochs):
# loop over each individual data point and train
# our network on it
for (x, target) in zip(X, y):
self.fit_partial(x, target)
# check to see if we should display a training update
if epoch == 0 or (epoch + 1) % displayUpdate == 0:
loss = self.calculate_loss(X, y)
print("[INFO] epoch={}, loss={:.7f}".format(
epoch + 1, loss))
The fit method requires two parameters, followed by two optional ones. The first, X, is our training data. The second, y, is the corresponding class labels for each entry in X. We then specify epochs, which is the number of epochs we’ll train our network for. The displayUpdate parameter simply controls how many N epochs we’ll print training progress to our terminal.
On Line 47, we perform the bias trick by inserting a column of 1’s as the last entry in our feature matrix, X. From there, we start looping over our number of epochs on Line 50. For each epoch, we’ll loop over each individual data point in our training set, make a prediction on the data point, compute the backpropagation phase, and then update our weight matrix (Lines 53 and 54). Lines 57-60 simply check to see if we should display a training update to our terminal.
The actual heart of the backpropagation algorithm is found inside our fit_partial method below:
def fit_partial(self, x, y): # construct our list of output activations for each layer # as our data point flows through the network; the first # activation is a special case -- it's just the input # feature vector itself A = [np.atleast_2d(x)]
The fit_partial function requires two parameters:
x: An individual data point from our design matrix.y: The corresponding class label.
We then initialize a list, A, on Line 67 — this list is responsible for storing the output activations for each layer as our data point x forward propagates through the network. We initialize this list with x, which is simply the input data point.
From here, we can start the forward propagation phase:
# FEEDFORWARD: # loop over the layers in the network for layer in np.arange(0, len(self.W)): # feedforward the activation at the current layer by # taking the dot product between the activation and # the weight matrix -- this is called the "net input" # to the current layer net = A[layer].dot(self.W[layer]) # computing the "net output" is simply applying our # nonlinear activation function to the net input out = self.sigmoid(net) # once we have the net output, add it to our list of # activations A.append(out)
We start looping over every layer in the network on Line 71. The net input to the current layer is computed by taking the dot product between the activation and the weight matrix (Line 76). The net output of the current layer is then computed by passing the net input through the nonlinear sigmoid activation function. Once we have the net output, we add it to our list of activations (Line 84).
Believe it or not, this code is the entirety of the forward pass — we are simply looping over each of the layers in the network, taking the dot product between the activation and the weights, passing the value through a nonlinear activation function, and continuing to the next layer. The final entry in A is thus the output of the last layer in our network (i.e., the prediction).
Now that the forward pass is done, we can move on to the slightly more complicated backward pass:
# BACKPROPAGATION # the first phase of backpropagation is to compute the # difference between our *prediction* (the final output # activation in the activations list) and the true target # value error = A[-1] - y # from here, we need to apply the chain rule and build our # list of deltas 'D'; the first entry in the deltas is # simply the error of the output layer times the derivative # of our activation function for the output value D = [error * self.sigmoid_deriv(A[-1])]
The first phase of the backward pass is to compute our error, or simply the difference between our predicted label and the ground-truth label (Line 91). Since the final entry in the activations list A contains the output of the network, we can access the output prediction via A[-1]. The value y is the target output for the input data point x.
Remark: When using the Python programming language, specifying an index value of -1 indicates that we would like to access the last entry in the list. You can read more about Python array indexes and slices in this tutorial: http://pyimg.co/6dfae.
Next, we need to start applying the chain rule to build our list of deltas, D. The deltas will be used to update our weight matrices, scaled by the learning rate alpha. The first entry in the deltas list is the error of our output layer multiplied by the derivative of the sigmoid for the output value (Line 97).
Given the delta for the final layer in the network, we can now work backward using a for loop:
# once you understand the chain rule it becomes super easy # to implement with a 'for' loop -- simply loop over the # layers in reverse order (ignoring the last two since we # already have taken them into account) for layer in np.arange(len(A) - 2, 0, -1): # the delta for the current layer is equal to the delta # of the *previous layer* dotted with the weight matrix # of the current layer, followed by multiplying the delta # by the derivative of the nonlinear activation function # for the activations of the current layer delta = D[-1].dot(self.W[layer].T) delta = delta * self.sigmoid_deriv(A[layer]) D.append(delta)
On Line 103, we start looping over each of the layers in the network (ignoring the previous two layers as they are already accounted for in Line 97) in reverse order as we need to work backward to compute the delta updates for each layer. The delta for the current layer is equal to the delta of the previous layer, D[-1] dotted with the weight matrix of the current layer (Line 109). To finish off the computation of the delta, we multiply it by passing the activation for the layer through our derivative of the sigmoid (Line 110). We then update the deltas D list with the delta we just computed (Line 111).
Looking at this block of code we can see that the backpropagation step is iterative — we are simply taking the delta from the previous layer, dotting it with the weights of the current layer, and then multiplying by the derivative of the activation. This process is repeated until we reach the first layer in the network.
Given our deltas list D, we can move on to the weight update phase:
# since we looped over our layers in reverse order we need to # reverse the deltas D = D[::-1] # WEIGHT UPDATE PHASE # loop over the layers for layer in np.arange(0, len(self.W)): # update our weights by taking the dot product of the layer # activations with their respective deltas, then multiplying # this value by some small learning rate and adding to our # weight matrix -- this is where the actual "learning" takes # place self.W[layer] += -self.alpha * A[layer].T.dot(D[layer])
Keep in mind that during the backpropagation step we looped over our layers in reverse order. To perform our weight update phase, we’ll simply reverse the ordering of entries in D so we can loop over each layer sequentially from 0 to N, the total number of layers in the network (Line 115).
Updating our actual weight matrix (i.e., where the actual “learning” takes place) is accomplished on Line 125, which is our gradient descent. We take the dot product of the current layer activation, A[layer] with the deltas of the current layer, D[layer] and multiply them by the learning rate, alpha. This value is added to the weight matrix for the current layer, W[layer].
We repeat this process for all layers in the network. After performing the weight update phase, backpropagation is officially done.
Once our network is trained on a given dataset, we’ll want to make predictions on the testing set, which can be accomplished via the predict method below:
def predict(self, X, addBias=True): # initialize the output prediction as the input features -- this # value will be (forward) propagated through the network to # obtain the final prediction p = np.atleast_2d(X) # check to see if the bias column should be added if addBias: # insert a column of 1's as the last entry in the feature # matrix (bias) p = np.c_[p, np.ones((p.shape[0]))] # loop over our layers in the network for layer in np.arange(0, len(self.W)): # computing the output prediction is as simple as taking # the dot product between the current activation value 'p' # and the weight matrix associated with the current layer, # then passing this value through a nonlinear activation # function p = self.sigmoid(np.dot(p, self.W[layer])) # return the predicted value return p
The predict function is simply a glorified forward pass. This function accepts one required parameter followed by a second optional one:
X: The data points we’ll be predicting class labels for.addBias: A boolean indicating whether we need to add a column of 1’s toXto perform the bias trick.
On Line 131, we initialize p, the output predictions as the input data points X. This value p will be passed through every layer in the network, propagating until we reach the final output prediction.
On Lines 134-137, we make a check to see if the bias term should be embedded into the data points. If so, we insert a column of 1’s as the last column in the matrix (exactly as we did in the fit method above).
From there, we perform the forward propagation by looping over all layers in our network on Line 140. The data points p are updated by taking the dot product between the current activations p and the weight matrix for the current layer, followed by passing the output through our sigmoid activation function (Line 146).
Given that we are looping over all layers in the network, we’ll eventually reach the final layer, which will give us our final class label prediction. We return the predicted value to the calling function on Line 149.
The final function we’ll define inside the NeuralNetwork class will be used to calculate the loss across our entire training set:
def calculate_loss(self, X, targets): # make predictions for the input data points then compute # the loss targets = np.atleast_2d(targets) predictions = self.predict(X, addBias=False) loss = 0.5 * np.sum((predictions - targets) ** 2) # return the loss return loss
The calculate_loss function requires that we pass in the data points X along with their ground-truth labels, targets. We make predictions on X on Line 155 and then compute the sum squared error on Line 156. The loss is then returned to the calling function on Line 159. As our network learns, we should see this loss decrease.
Backpropagation with Python Example #1: Bitwise XOR
Now that we have implemented our NeuralNetwork class, let’s go ahead and train it on the bitwise XOR dataset. As we know from our work with the Perceptron, this dataset is not linearly separable — our goal will be to train a neural network that can model this nonlinear function.
Go ahead and open a new file, name it nn_xor.py, and insert the following code:
# import the necessary packages from pyimagesearch.nn import NeuralNetwork import numpy as np # construct the XOR dataset X = np.array([[0, 0], [0, 1], [1, 0], [1, 1]]) y = np.array([[0], [1], [1], [0]])
Lines 2 and 3 import our required Python packages. Notice how we are importing our newly implemented NeuralNetwork class. Lines 6 and 7 then construct the XOR dataset.
We can now define our network architecture and train it:
# define our 2-2-1 neural network and train it nn = NeuralNetwork([2, 2, 1], alpha=0.5) nn.fit(X, y, epochs=20000)
On Line 10, we instantiate our NeuralNetwork to have a 2−2−1 architecture, implying there is:
- An input layer with two nodes (i.e., our two inputs).
- A single hidden layer with two nodes.
- An output layer with one node.
Line 11 trains our network for a total of 20,000 epochs.
Once our network is trained, we’ll loop over our XOR datasets, allow the network to predict the output for each one, and display the prediction on our screen:
# now that our network is trained, loop over the XOR data points
for (x, target) in zip(X, y):
# make a prediction on the data point and display the result
# to our console
pred = nn.predict(x)[0][0]
step = 1 if pred > 0.5 else 0
print("[INFO] data={}, ground-truth={}, pred={:.4f}, step={}".format(
x, target[0], pred, step))
Line 18 applies a step function to the sigmoid output. If the prediction is > 0.5, we’ll return one, otherwise, we will return zero. Applying this step function allows us to binarize our output class labels, just like the XOR function.
To train our neural network using backpropagation with Python, simply execute the following command:
$ python nn_xor.py [INFO] epoch=1, loss=0.5092796 [INFO] epoch=100, loss=0.4923591 [INFO] epoch=200, loss=0.4677865 ... [INFO] epoch=19800, loss=0.0002478 [INFO] epoch=19900, loss=0.0002465 [INFO] epoch=20000, loss=0.0002452
A plot of the squared loss is displayed below (Figure 3). As we can see, loss slowly decreases to approximately zero over the course of training. Furthermore, looking at the final four lines of the output we can see our predictions:
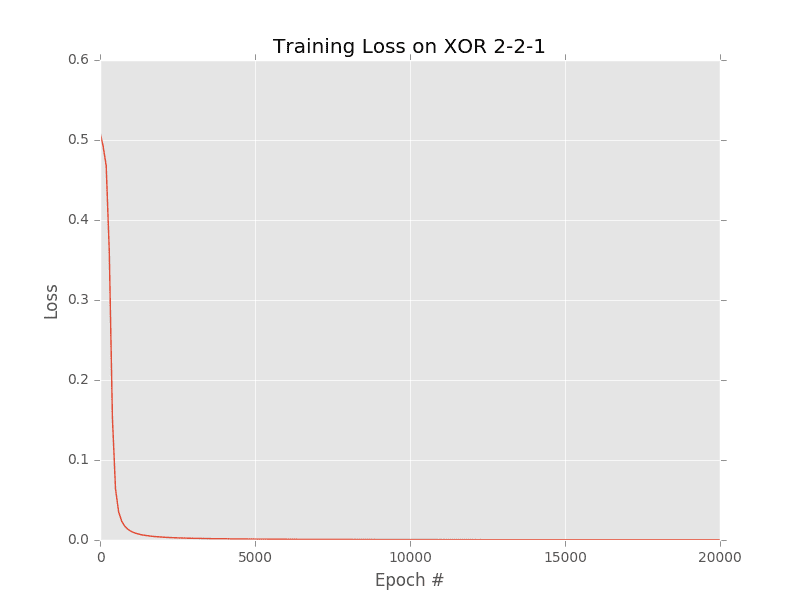
[INFO] data=[0 0], ground-truth=0, pred=0.0054, step=0 [INFO] data=[0 1], ground-truth=1, pred=0.9894, step=1 [INFO] data=[1 0], ground-truth=1, pred=0.9876, step=1 [INFO] data=[1 1], ground-truth=0, pred=0.0140, step=0
For each and every data point, our neural network was able to correctly learn the XOR pattern, demonstrating that our multi-layer neural network is capable of learning nonlinear functions.
To demonstrate that least one hidden layer is required to learn the XOR function, go back to Line 10 where we define the 2−2−1 architecture:
# define our 2-2-1 neural network and train it nn = NeuralNetwork([2, 2, 1], alpha=0.5) nn.fit(X, y, epochs=20000)
And change it to be a 2-1 architecture:
# define our 2-1 neural network and train it nn = NeuralNetwork([2, 1], alpha=0.5) nn.fit(X, y, epochs=20000)
From there, you can attempt to retrain your network:
$ python nn_xor.py ... [INFO] data=[0 0], ground-truth=0, pred=0.5161, step=1 [INFO] data=[0 1], ground-truth=1, pred=0.5000, step=1 [INFO] data=[1 0], ground-truth=1, pred=0.4839, step=0 [INFO] data=[1 1], ground-truth=0, pred=0.4678, step=0
No matter how much you fiddle with the learning rate or weight initializations, you’ll never be able to approximate the XOR function. This fact is why multi-layer networks with nonlinear activation functions trained via backpropagation are so important — they enable us to learn patterns in datasets that are otherwise nonlinearly separable.
Backpropagation with Python Example: MNIST Sample
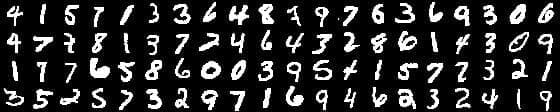
As a second, more interesting example, let’s examine a subset of the MNIST dataset (Figure 4) for handwritten digit recognition. This subset of the MNIST dataset is built-into the scikit-learn library and includes 1,797 example digits, each of which are 8×8 grayscale images (the original images are 28×28). When flattened, these images are represented by an 8×8 = 64-dim vector.
Let’s go ahead and train our NeuralNetwork implementation on this MNIST subset now. Open a new file, name it nn_mnist.py, and we’ll get to work:
# import the necessary packages from pyimagesearch.nn import NeuralNetwork from sklearn.preprocessing import LabelBinarizer from sklearn.model_selection import train_test_split from sklearn.metrics import classification_report from sklearn import datasets
We start on Lines 2-6 by importing our required Python packages.
From there, we load the MNIST dataset from disk using the scikit-learn helper functions:
# load the MNIST dataset and apply min/max scaling to scale the
# pixel intensity values to the range [0, 1] (each image is
# represented by an 8 x 8 = 64-dim feature vector)
print("[INFO] loading MNIST (sample) dataset...")
digits = datasets.load_digits()
data = digits.data.astype("float")
data = (data - data.min()) / (data.max() - data.min())
print("[INFO] samples: {}, dim: {}".format(data.shape[0],
data.shape[1]))
We also perform min/max normalizing by scaling each digit into the range [0, 1] (Line 14).
Next, let’s construct a training and testing split, using 75% of the data for testing and 25% for evaluation:
# construct the training and testing splits (trainX, testX, trainY, testY) = train_test_split(data, digits.target, test_size=0.25) # convert the labels from integers to vectors trainY = LabelBinarizer().fit_transform(trainY) testY = LabelBinarizer().fit_transform(testY)
We’ll also encode our class label integers as vectors, a process called one-hot encoding.
From there, we are ready to train our network:
# train the network
print("[INFO] training network...")
nn = NeuralNetwork([trainX.shape[1], 32, 16, 10])
print("[INFO] {}".format(nn))
nn.fit(trainX, trainY, epochs=1000)
Here, we can see that we are training a NeuralNetwork with a 64−32−16−10 architecture. The output layer has ten nodes due to the fact that there are ten possible output classes for the digits 0-9.
We then allow our network to train for 1,000 epochs. Once our network has been trained, we can evaluate it on the testing set:
# evaluate the network
print("[INFO] evaluating network...")
predictions = nn.predict(testX)
predictions = predictions.argmax(axis=1)
print(classification_report(testY.argmax(axis=1), predictions))
Line 34 computes the output predictions for every data point in testX. The predictions array has the shape (450, 10) as there are 450 data points in the testing set, each of which with ten possible class label probabilities.
To find the class label with the largest probability for each data point, we use the argmax function on Line 35 — this function will return the index of the label with the highest predicted probability. We then display a nicely formatted classification report to our screen on Line 36.
To train our custom NeuralNetwork implementation on the MNIST dataset, just execute the following command:
$ python nn_mnist.py
[INFO] loading MNIST (sample) dataset...
[INFO] samples: 1797, dim: 64
[INFO] training network...
[INFO] NeuralNetwork: 64-32-16-10
[INFO] epoch=1, loss=604.5868589
[INFO] epoch=100, loss=9.1163376
[INFO] epoch=200, loss=3.7157723
[INFO] epoch=300, loss=2.6078803
[INFO] epoch=400, loss=2.3823153
[INFO] epoch=500, loss=1.8420944
[INFO] epoch=600, loss=1.3214138
[INFO] epoch=700, loss=1.2095033
[INFO] epoch=800, loss=1.1663942
[INFO] epoch=900, loss=1.1394731
[INFO] epoch=1000, loss=1.1203779
[INFO] evaluating network...
precision recall f1-score support
0 1.00 1.00 1.00 45
1 0.98 1.00 0.99 51
2 0.98 1.00 0.99 47
3 0.98 0.93 0.95 43
4 0.95 1.00 0.97 39
5 0.94 0.97 0.96 35
6 1.00 1.00 1.00 53
7 1.00 1.00 1.00 49
8 0.97 0.95 0.96 41
9 1.00 0.96 0.98 47
avg / total 0.98 0.98 0.98 450
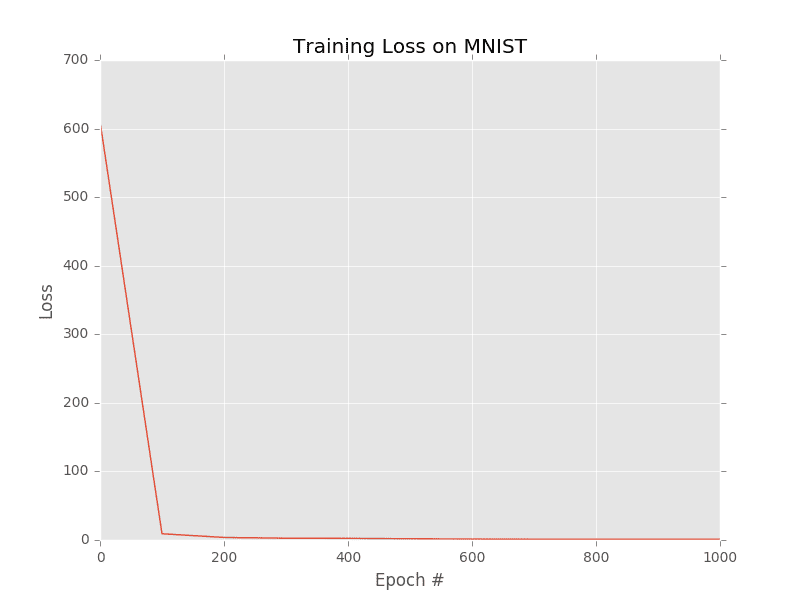
I have included a plot of the squared loss as well (Figure 5). Notice how our loss starts off very high, but quickly drops during the training process. Our classification report demonstrates that we are obtaining ≈98% classification accuracy on our testing set; however, we are having some trouble classifying digits 4 and 5 (95% and 94% accuracy, respectively). Later in this book, we’ll learn how to train Convolutional Neural Networks on the full MNIST dataset and improve our accuracy further.
What's next? We recommend PyImageSearch University.
86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: June 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Backpropagation Summary
Today, we learned how to implement the backpropagation algorithm from scratch using Python. Backpropagation is a generalization of the gradient descent family of algorithms that is specifically used to train multi-layer feedforward networks.
The backpropagation algorithm consists of two phases:
- The forward pass where we pass our inputs through the network to obtain our output classifications.
- The backward pass (i.e., weight update phase) where we compute the gradient of the loss function and use this information to iteratively apply the chain rule to update the weights in our network.
Regardless of whether we are working with simple feedforward neural networks or complex, deep Convolutional Neural Networks, the backpropagation algorithm is still used to train these models. This is accomplished by ensuring that the activation functions inside the network are differentiable, allowing the chain rule to be applied. Furthermore, any other layers inside the network that require updates to their weights/parameters, must also be compatible with backpropagation as well.
We implemented our backpropagation algorithm using the Python programming language and devised a multi-layer, feedforward NeuralNetwork class. This implementation was then trained on the XOR dataset to demonstrate that our neural network is capable of learning nonlinear functions by applying the backpropagation algorithm with at least one hidden layer. We then applied the same backpropagation + Python implementation to a subset of the MNIST dataset to demonstrate that the algorithm can be used to work with image data as well.
In practice, backpropagation can be not only challenging to implement (due to bugs in computing the gradient), but also hard to make efficient without special optimization libraries, which is why we often use libraries such as Keras, TensorFlow, and mxnet that have already (correctly) implemented backpropagation using optimized strategies.

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

Comment section
Hey, Adrian Rosebrock here, author and creator of PyImageSearch. While I love hearing from readers, a couple years ago I made the tough decision to no longer offer 1:1 help over blog post comments.
At the time I was receiving 200+ emails per day and another 100+ blog post comments. I simply did not have the time to moderate and respond to them all, and the sheer volume of requests was taking a toll on me.
Instead, my goal is to do the most good for the computer vision, deep learning, and OpenCV community at large by focusing my time on authoring high-quality blog posts, tutorials, and books/courses.
If you need help learning computer vision and deep learning, I suggest you refer to my full catalog of books and courses — they have helped tens of thousands of developers, students, and researchers just like yourself learn Computer Vision, Deep Learning, and OpenCV.
Click here to browse my full catalog.